裴树伟

Personal CV
Shuwei Pei/ Travid
Hi there 👋, my dear friends!
- 🔭 I’m currently looking for a PhD position to apply for Fall 2024.
- 💌 peishuwei9@live.com
- 👨🏫 Academic Pre
- 📝 Speech Notes
- 📑 PDF Simple CV
- 🎓 中文简历
- 👀 双语简历
Research Interest
Automated driving, Intelligent electric vehicles, Intelligent transportation systems, Velocity optimization, Deep reinforcement learning, Vehicle Dynamics and Control, Decision making, Energy consumption
Self Statement
I am highly devoted to the automobile industry and intensely interested in autonomous robotics, and multi-agent reinforcement learning. I have a strong sense of responsibility and extraordinary ability for team communication and cooperation, thus being able to get along well with other members of a team. I am good at analyzing, thinking, and summarizing, and can therefore get used to new fields easily. With my experience as an exchange student for half a year, I can communicate with people in English fluently.
Education
M.E. in Mechanical Engineering, University of Science and Technology Beijing
September 2021 - June 2024 (expected)
- GPA: 3.62/4.0
- Rank: 26/67
- Centesimal grade average: 86.2
B.E. in Mechanical Engineering, University of Science and Technology Beijing
September 2017 - June 2021
- GPA: 3.68/4.0
- Rank: 9/60
- Centesimal grade average: 87.3
Exchange Student in Mechanical Engineering, National Taipei University of Technology
September 2019 - January 2020
- GPA: 3.82/4.0
- Centesimal grade average: 88.3
Publications
1. A Novel Integrated Deep Reinforcement Learning Approach with Trajectory Optimization for Mining Autonomous Truck Dispatch
Shuwei Pei and Jue Yang. Submitted to Resources, Conservation and Recycling, 2023
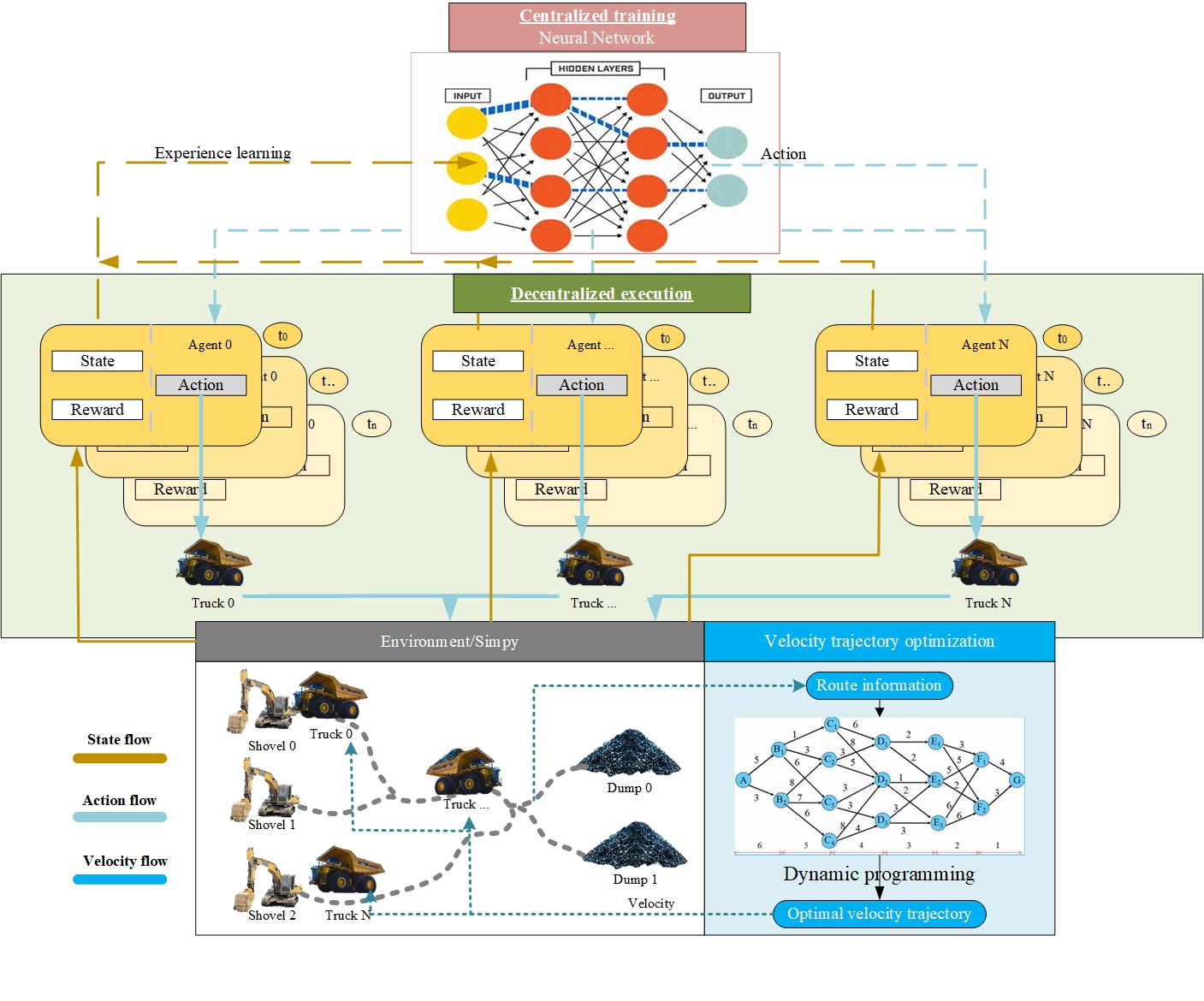
In the domain of mining transportation, conventional scheduling, and human-controlled approaches often result in diminished efficiency and suboptimal outcomes, encompassing resource wastage, increased energy consumption, and safety risks. A novel open pit mining haulage simulation environment is established to facilitate dispatching operations. By integrating the Deep Q-Network (DQN), a model-free reinforcement learning system, with the dynamic programming trajectory optimization method, the efficiency of mining operations can be enhanced, thereby reducing waiting times and energy consumption. The proposed method aims to train the fleet to make more informed decisions regarding payload management, queueing time, and the number of waiting trucks. The approach is valid in the simulator several times. It results in a 10% reduction in average energy consumption for transporting one kg and a 3.8k ton increase in total production compared to the conventional fixed schedule (FS) strategy. The dispatching policy generated by the DQN algorithm demonstrates more balanced tasks between dump sites and shovel sites. It also shows robustness in handling unplanned truck failures.
2. Multi-Objective Velocity Trajectory Optimization Method for Autonomous Mining Vehicles
Shuwei Pei and Jue Yang. Accepted by International Journal of Automotive Technology, 2023

Autonomous mining transportation is an intelligent traffic control system that can provide better economics than traditional transportation systems. The velocity trajectory of a manned vehicle depends on the driver’s driving style. Still, it can be optimized utilizing mathematical methods under autonomous driving conditions. This paper takes fuel and electric mining vehicles with a load capacity of 50 tons as the subject. It contributes a multi-objective optimization approach considering time, energy consumption, and battery lifetime. The dynamic programming algorithm is used to solve the optimal velocity trajectory with different optimization objectives under two types of mining condition simulation. The trajectories optimized by the single objective, energy consumption, usually adopt the pulse-and-gliding (PnG) approach frequently, which causes battery capacity loss and increases the travel time. Hence, a multi-objective optimization approach is proposed. For electric vehicles, trajectories optimized by the multi-objective approach can decrease the battery capacity loss by 22.01% and the time consumption by 41.28%, leading to a 42.12% increment in energy consumption. For fuel vehicles, it can decrease the time consumption by 32.54%, leading to a 7.68% increment in energy consumption. This velocity trajectory is smoother with less fluctuation. It can better meet the requirements of mining transportation and has a particular reference value for optimizing autonomous transportation costs in closed areas.
Research Experience
1. Optimal Speed Trajectory of Mining Vehicle
2021 – 2022
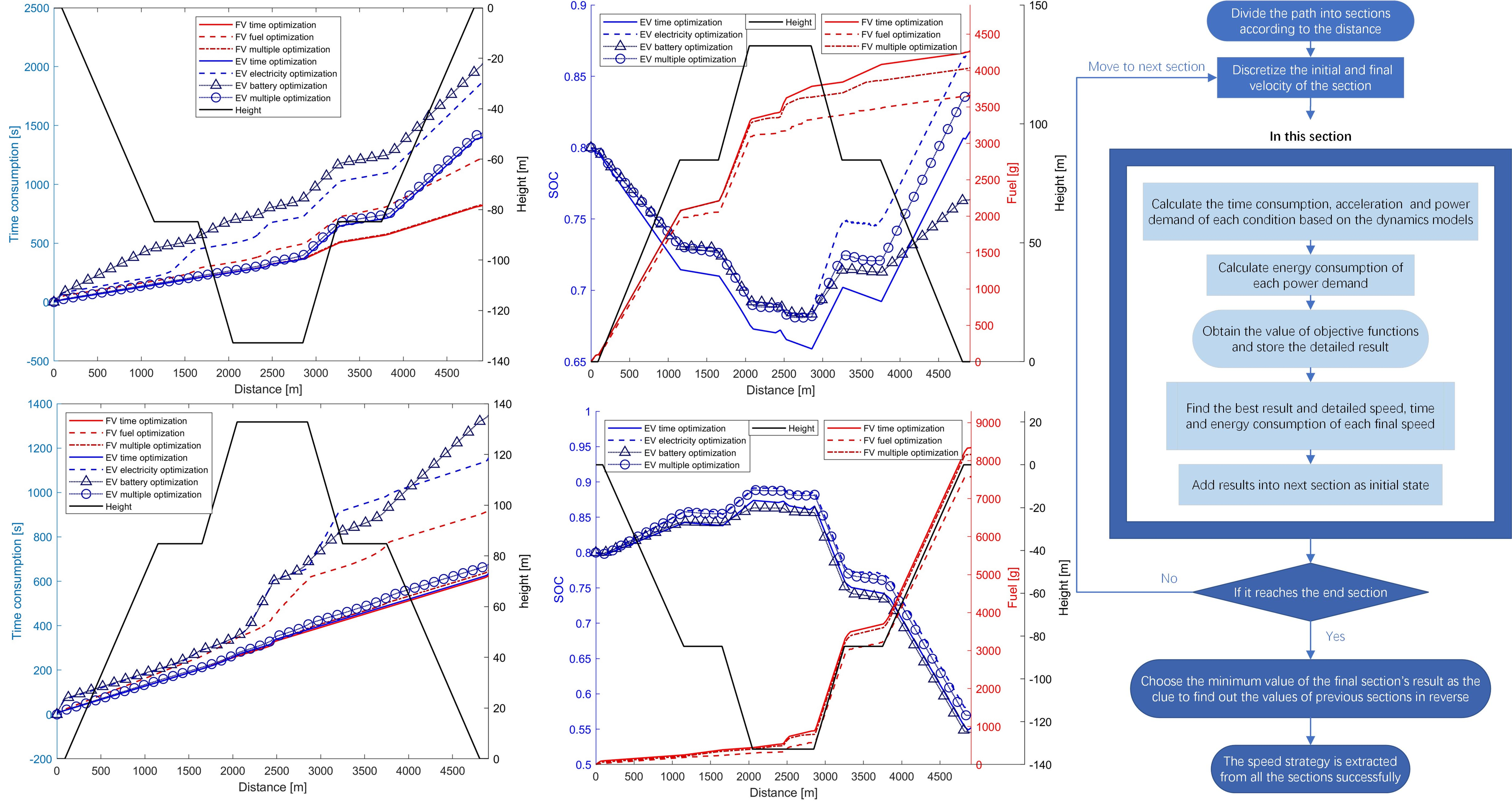
- In conventional manned vehicles, the overall transport cost is mainly related to the driver’s driving habits and experience. Velocity optimization of vehicles is one of the main eco-driving techniques.
- A multi-objective speed trajectory optimization method using dynamic programming was proposed considering travel time, energy consumption, and battery lifetime. And it is verified on the fuel and electric vehicle models.
- The results spend less time and it runs with less velocity fluctuations. Moreover, it can reduce battery capacity loss, which prolongs the battery’s lifetime for electric vehicles. It will adopt different frequencies of PnG approach as the gradient of routes changes.
- However, it leads to an increment in energy consumption. It is a kind of Pareto optimal trade-off.
2. Reinforcement Learning-Based Fleet Dispatching with Trajectory Optimization
2022 - Present
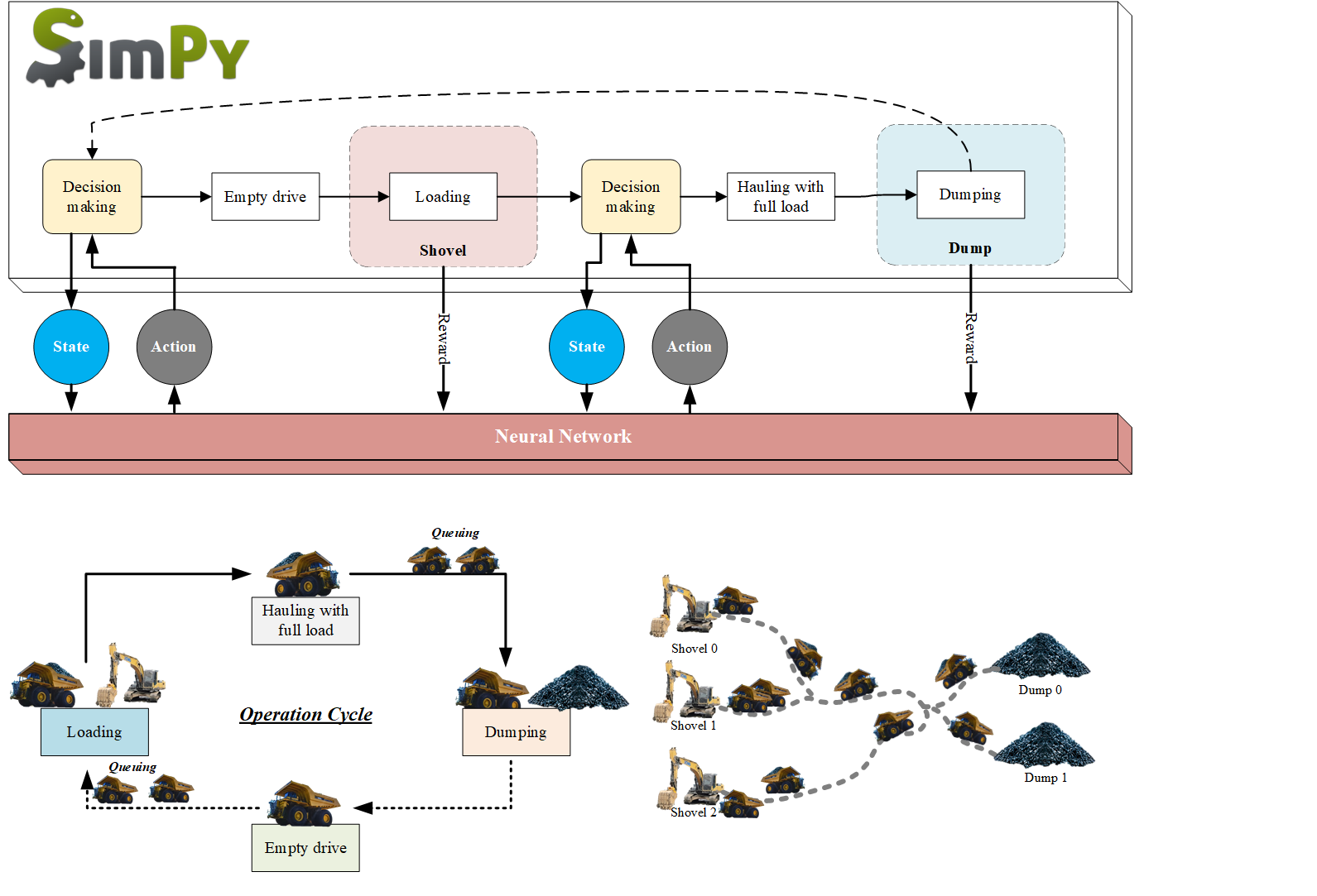
- The concept of smart mining has emerged as an attractive topic worldwide. Mining haulage fuel consumption contributes to more than half of the greenhouse gas emissions in this sector.
- A novel mining haulage simulation environment is established to facilitate dispatching operations. By integrating the Deep Q-Network, a model-free reinforcement learning system, with the dynamic programming optimization method, the efficiency of mining operations can be enhanced, thereby reducing waiting times and energy consumption.
- It results in a 10% reduction in average energy consumption for transporting 1 kg and a 3.8k ton increase in total production compared to the conventional fixed schedule strategy. The policy generated by the DQN demonstrates more balanced tasks between dump and shovel sites. It also shows robustness in handling truck failures.
3. The Electric Autonomous Mining Truck Without Cabin
2022 - Present

- Autonomous driving mining vehicles without the cabin can improve the existing transportation and production in terms of safety, transportation efficiency, and energy consumption.
- Designed a solution for battery exchange transfer and system, remote control, and install the various sensors. Analyze and diagnose the breakdown of the autonomous vehicle, including TCS, EBS, and Hydraulic steering system.
- Dispatched 10 homogeneous autonomous vehicles in a closed mining area by using the intelligent system in real time. Enhanced the full-time autonomous operation capability to reach more than 120% of the manual by EV trucks.
4. Theoretical Research on Autonomous Vehicles Based on ROS2
2021 – 2022
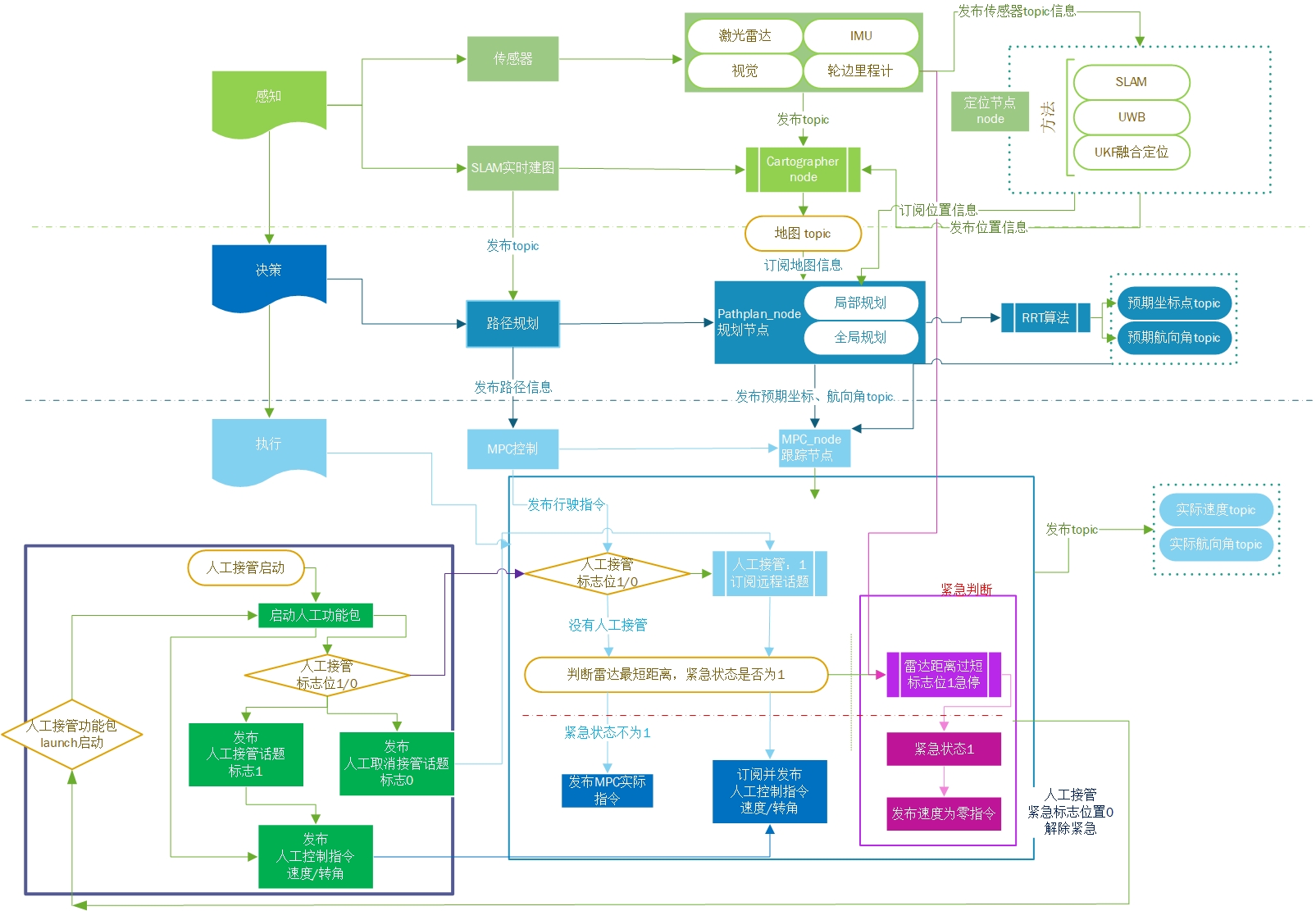
- Based on ROS2 in the Ubuntu22.04 system, built nodes for perception, localization, path planning, and MPC tracking.
- Designed topics of publish-subscribe nodes using C++, and debugged vehicles in the gazebo simulation environment.
- RRT search algorithm was used to find the feasible path, and MPC was used to track and control.
Working Experience
1. China National Heavy Duty Truck Group Co., Ltd. Jinan, CHN
Intern in Light Truck July 2022-September 2022

- Analyzed the market of refrigerator cars and modified the chassis structure of light trucks to meet the national standard.
- The truck chassis is changed to achieve refrigeration, insulation, storage, monitoring, freshing and other functions.
2. German Association of the Automotive Industry Beijing, CHN
Intern in China Office September 2020 - December 2020

- Coordinated with Chinese and German staff in English and updated the German manager’s calendar.
- Translated the German manager’s English speech and summarized the latest automobile industry development in China.
- Dealt with the office administrative work and supported the company in organizing automobile forum activities.
- Analyzed European and Chinese electric vehicle market data and development policies.
3. Midea Group Co., Ltd. Foshan, CHN
Intern in Lean Management June 2020 - August 2020

- Made statistics on the operation time of different manufacturing lines, and accurately adjusted the production sequence.
- Implemented automatic logistics vehicles in plants and improved transport efficiency by 1.2%.
Awards & Honors
- The Second Price Scholarship, University of Science and Technology Beijing, 2023
- The Second Price Scholarship, Roberto Rocca Scholarship, 2023
- Excellent Graduate Cadre, University of Science and Technology Beijing, 2022
- The Second Price Scholarship, University of Science and Technology Beijing, 2022
- Bronze Award, 3-Minute Thesis Speech Contest, University of Science and Technology Beijing, 2022
- National Second Prize, China Industrial Internet Contest, 2021
- Outstanding Graduates, University of Science and Technology Beijing, 2021
- The Third Price Scholarship, University of Science and Technology Beijing, 2020
- Top 10 Golden Team, Alumni Liaison and Development Association, University of Science and Technology Beijing, 2020
- The Third Price Scholarship, University of Science and Technology Beijing, 2019
- The Third Price Scholarship, University of Science and Technology Beijing, 2018
- Excellent Student Cadre, University of Science and Technology Beijing, 2018
- Advanced Individual, University of Science and Technology Beijing, 2018
- Merit Student, University of Science and Technology Beijing, 2018
- The Second Price, Smile Relay Interpretation Contest, University of Science and Technology Beijing, 2017
- Excellent Student Cadre, University of Science and Technology Beijing, 2017
Selected Courses
Postgraduate:
Operational Research (82), Mathematical Modeling (92), Modern Control Theory (90), Signal Analysis and Processing (86), Intelligent Algorithm (92), Vehicle System Dynamics (87), Equipment Fault Diagnosis Technology (83), Special Vehicle Design (88), Intelligent Technology of Engineering Vehicle (87), Digital Image Processing (88).
Undergraduate:
Calculus AI (92), Engineering Physics BI (93), Calculus AII (93), Theoretical Mechanics A (98), Thermal Engineering (92), Engineering Physics BII (93), Mechanics of Materials (90), Probability & Mathematical Statistics A (92), Measuring and control experiment (92), Automatic Control Theory (97), Mechanical Design (90), Principles and Applications of Microcomputers (99), Automatic Transmission (95).
Skills
- Programming Matlab, LaTex, Python, Pytorch, C/C++, Simpy
- Language Chinese(Mother Tongue), English(IELTS 7.5)
- Software Office, Endnote, Visio, Solidworks, CAD, Carsim, Simulink
- Hobbey Swimming, Bodybuilding, Photography
References
Prof. Jue Yang
- School of Mechanical Engineering
- University of Science and Technology Beijing
- Email: yangjue@ustb.edu.cn
Prof. Xinxin Zhao
- School of Mechanical Engineering
- University of Science and Technology Beijing
- Email: xinxinzhao@ustb.edu.cn